


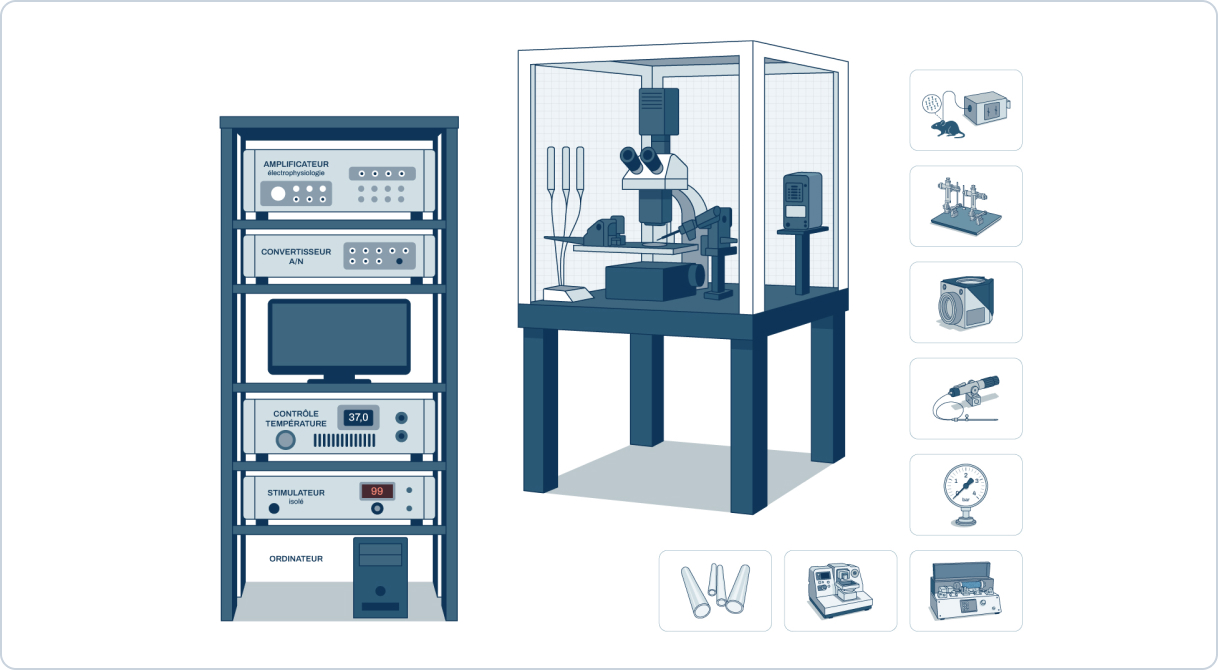
Micromanipulateurs pour électrophysiologie
MICRO MÉCANIQUE vous propose une gamme complète de micromanipulateurs couvrant toutes les configurations :
- avec microscope ou stéréo microscope
- du modèle manuel au système motorisé
- haute précision des systèmes hydrauliques à eau, ou mécanique
- des modèles motorisés ou piezoélectriques.
Vos avantages avec MICRO MÉCANIQUE :
- Choix exhaustif
- Précision et robustesse : des équipements conçus pour la stabilité et la reproductibilité.
- Support complet : conseil technique, installation, formation, maintenance et SAV partout en France.
Avec MICRO MÉCANIQUE, trouvez le micromanipulateur parfaitement adapté à vos protocoles, votre microscope et vos exigences expérimentales.

Affichage de 1–14 sur 27 résultats
-

Contrôleur tactile uMp-TSC2 autonome et intuitif pour le pilotage des micromanipulateurs.
-

Module back-flip uMp-FLP pour basculement facile du micromanipulateur et support de pipette.
-

Module de glissière pour déplacement rapide du micromanipulateur et support de pipette hors zone d’échantillon.
-

Module de rotation uMp-ROT pour déplacement facile du micromanipulateur et support de pipette grâce à un mouvement de rotation contrôlé.
-

Micromanipulateur piézo-électrique uMp-3 SENSAPEX pour patch-clamp, zéro-dérive, haute précision (5 nm), compact et stable, adapté aux espaces restreints et contrôlable par PC.
-

Micromanipulateur piézo uMp-4 SENSAPEX 4 axes, zéro-dérive, haute précision (5 nm), compact, avec 4ème axe physique pour stéréotaxie et angle d’approche 0–90°.
-

L’approcheur mécanique Narishige 3 axes MMN‑1 est un micromanipulateur manuel à déplacement grossier pour la préparation rapide de micropipettes avant micromanipulation fine.
-

Micromanipulateur hydraulique MHW-4, stable et précis, avec graduation minimale de 0,2 µm.
-

Micromanipulateur 3 axes autonome avec axe diagonal réglable, contrôle ROE, précision sub-micrométrique, idéal pour enregistrements in vitro et in vivo.
-

Micromanipulateur 3 axes avec 1 axe diagonal, alternative économique au MP-285, adapté à l’électrophysiologie in vivo et in vitro, incluant des fonctions essentielles pour le positionnement précis des pipettes et micro-électrodes.
-

Micromanipulateur 3 axes avec 1 axe diagonal, stable, silencieux et précis, adapté aux enregistrements Patch Clamp, microinjection et positionnement robotique de précision.
-

Micromanipulateur hydraulique à eau 3 axes pour patch-clamp, déplacements fins de 10 mm, haute précision et stabilité thermique, compatible avec microscopes via adaptateurs Narishige.
-

Micromanipulateur hydraulique à eau MHW-3, stable et précis, avec dérive minimale et conduite rigide pour des manipulations rapides.
-

Appareil manuel à trois axes conçu pour les applications de patch-clamp et de micromanipulation.
